Robot projects page - Rasmus Friis Kjeldsen
Ridgy
 Read about progress on my robot Ridgy on my blog: rasmuskjeldsen.blogspot.com, and read here: for more on the software/algorithms.
Read about progress on my robot Ridgy on my blog: rasmuskjeldsen.blogspot.com, and read here: for more on the software/algorithms.I participated in RoboCup 2010 with it, and came in as number 8. I'm now implementing landmark recognition using OpenCV and Monte Carlo Localization to make the robot navigate in my house - Obvious usage: Please fetch a beer :-) |
Master thesis: Robot Navigation
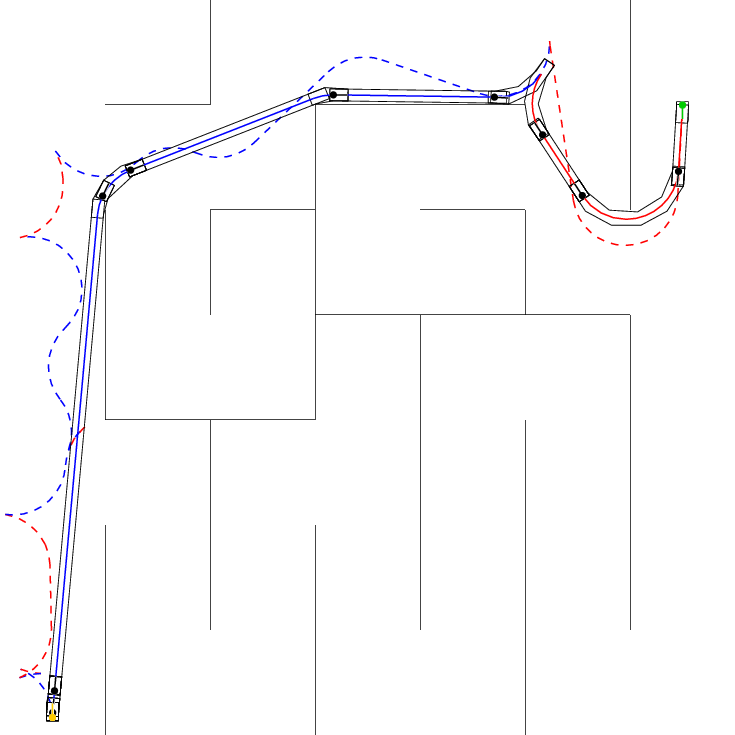 My master thesis page. The goal of the thesis is to have an
autonomous mobile car-like robot with a map of its environment plan and follow a route from
a given position to a given position.
My master thesis page. The goal of the thesis is to have an
autonomous mobile car-like robot with a map of its environment plan and follow a route from
a given position to a given position.
|
Stargate developer board
 See my experiences with
the Stargate developer board. See my experiences with
the Stargate developer board.
|
RoboCup 2005
 Here is a couple of pictures of my robot Murphy++. I wrote my master thesis in 2005, so there was not much time for the competition. By the way: I used the robot for
both the competition and for my master thesis. Here is a couple of pictures of my robot Murphy++. I wrote my master thesis in 2005, so there was not much time for the competition. By the way: I used the robot for
both the competition and for my master thesis.I came in as number 6 (of 24), and got mentioned in the press: Dansetrin og offroad på Robocup |
Graduate project: Robotsim
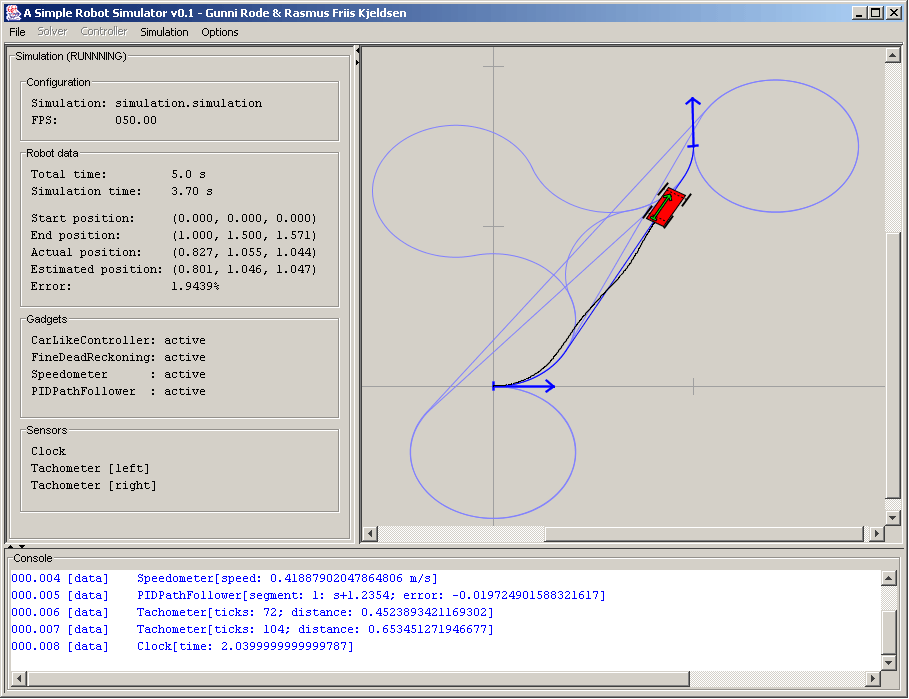 robotsim.pdf: A written project on robot simulation. robotsim.pdf: A written project on robot simulation.The project describes how to simulate a car-like robot, and how to find the shortest path from one position p1 to another position p2 for a car-like robot. A position is defined as the triple of the cartesian coordinates (x,y) and the orientation o: p=(x,y,o). The path finding algoritm is based on the work of L. E. Dubins: On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal position and tangents and J.A. Reeds & R.A. Shepp: Optimal paths for a car that goes both forward and backwards, and it points out and corrects several errors in the formulas stated by Reeds & Shepp. Finally it solves the Point-to-Point Motion Task by letting the car-like robot follow the shortest path using several different path-following algoritms. The text is in danish, but the figures/diagrams/formulas are understandable even if you dont read danish. |
RoboCup 2004
 Here is a picture. I came in as number 2 :-) Here is a picture. I came in as number 2 :-)
|
Graduate project: Robot Construction
 robotkonstruktion.pdf: A written project on robot construction.
robotkonstruktion.pdf: A written project on robot construction.How to build a Microchip PIC-based robot controller, and how to attach sensors and motors to the controller. Large section on the Sharp GP2D02 IR Distance Measuring Sensor. The text is in danish, but the figures/diagrams are understandable even if you dont read danish. |
Software
 A bootloader the PIC16F876 chip
A bootloader the PIC16F876 chip |
A PIC based LEGO controller / RoboCup 2003
 This controller later became part of
my robot for my partition in the DTU
Robocup 2003 competition. I came in as number 4 and won the prize
for best design/effects.
This controller later became part of
my robot for my partition in the DTU
Robocup 2003 competition. I came in as number 4 and won the prize
for best design/effects. |
A LEGO Mindstorms TV remote control robot
 My LEGO Mindstorms remote control robot for my old tv,
which doesn't have a remote control.
My LEGO Mindstorms remote control robot for my old tv,
which doesn't have a remote control.
|
Bachelor project:
 overkill.pdf - A written project on building a camera controlled robot
for the Robocup 2002 robot competition. The text is in danish!
We came in as number 12 of 16.
overkill.pdf - A written project on building a camera controlled robot
for the Robocup 2002 robot competition. The text is in danish!
We came in as number 12 of 16.Here is a couple of movies, the robot took during the competition: Final - First drive Final - First drive processed Final - Second drive Final - Second drive processed |
Find the middle
 Oral graduate project on autonomous robots: Rasmus Friis Kjeldsen, Lars Bo Thulin, Martin Leopold: Find the middle, 2001
Oral graduate project on autonomous robots: Rasmus Friis Kjeldsen, Lars Bo Thulin, Martin Leopold: Find the middle, 2001
|
You can contact me on email at: rasmus (AT) reblag (DOT) dk